没有雾,自主汽车是停滞不前

根据一项预测由福布斯今年3月,2000万年自动驾驶汽车到2020年将上路。估计到2030年,四分之一的自行驱动的汽车。
鉴于这种必然性,最明显的问题是:“我们准备好了吗?”
正如你想象的,数以百万计的机的安全操作炮弹同时加速自由在我们的道路提出了一些实施技术障碍。自主驾驶车辆(广告)还需要一个非常复杂的可靠的基础设施。没有犯错的余地。精确的操作在每一毫秒的开车时间是一切的关键。
广告的计算要求车辆是令人兴奋的。根据英特尔,到2020年每自主车辆将生成一个海啸——每天超过4000 GB的数据。等于所产生的数据量3000人,假设互联网用户平均每天生产1.5 GB。数学之后,公元一百万年车辆将生成尽可能多的数据,有30亿人。和每一位和字节致力于精密操作和安全——不可能有浪费或过剩。
这是英特尔的背后的故障计算:
- 摄像机~ 20 - 40 MB /秒
- 雷达~ 10 - 100 KB /秒
- 声呐~ 10 - 100 kb /秒
- GPS ~ 50 kb /秒
- 激光雷达~ 10 - 70 MB /秒(激光光探测和测距系统)
当然,广告车辆所产生的大量数据-加上实时服务需求为代价的网络资源。的确,广告车辆的工作负载需要不亚于世界上最先进的网络体系结构。
一个新的通信系统
国际米兰和intra-system通信需要一个全新的技术生态系统的发展,汇集了云,广告网络基础设施和道路基础设施。由于无缝,这些层次之间的实时通信是必需的,云交易本身就没有足够的广告。这就是雾计算和网络。
OpenFog参考体系结构发表在2月,提供了一个媒介——高级视图的系统架构为雾节点和网络在物联网中,5 g和AI -每个广告是至关重要的。如图表所示,多层OpenFog架构会填补这些空缺沿着cloud-to-thing连续通过支持vehicle-to-cloud (V2C)和vehicle-to-everything (V2X)连接。
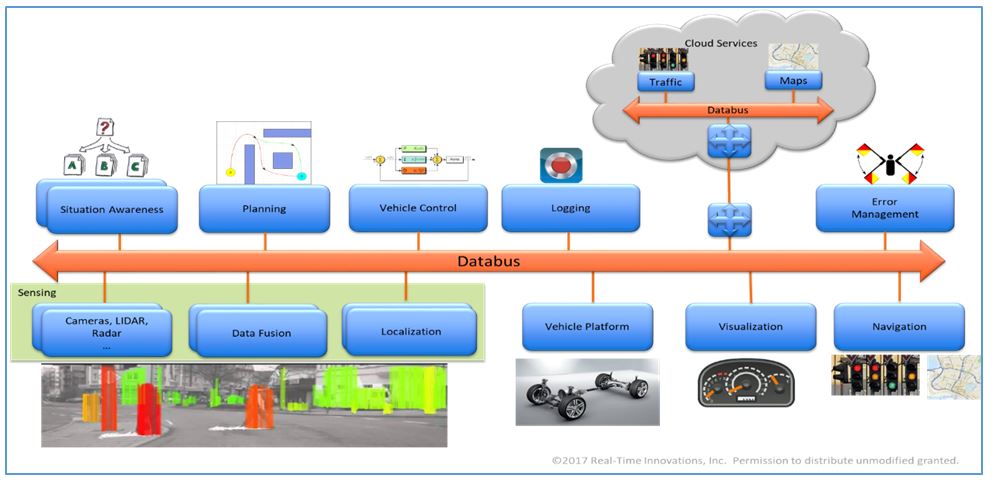
一个例子为自驾车辆雾计算架构。
传感器数据和视频/图像内容的广告宣传工具创建大量的上游流量(从汽车到云),以及大量的下游流量(从云到车辆)。这需要一个分布式vehicle-to-cloud模型,使安全服务。雾,每个车都有分布,在计算架构之间的重要连接多个计算节点上支持分析,存储和其他应用程序。
雾网络一般需要雾节点的形式排成低级控制计算机之间的层次结构在车辆和远程服务器的云。这个层次结构允许多个广告服务,帮助确定哪些服务需要使用云计算和服务是更有效地进行,没有云,在节点和网络水平。
坚持V2C技术OpenFog架构使广告流程,同时提供各种服务,协助广告驾驶过程(如实时高清地图)。这可以帮助车辆在公路上开车彼此合作和了解道路危险。雾雾还包括高级移动节点的协调功能的车辆底层处理器管理诸如动力系统控制,传感、防撞、导航、娱乐等等。
雾在路边单元节点也普遍,因此高性能计算和大型的、可靠的、安全的存储是位于网络跃点所有车辆的空头头寸。以上,地区雾节点坐标路边雾的操作节点,优化所有司机的智能高速公路。当雾与云计算基础设施,它是确保一切是安全的和有效的在整个智能交通系统。
雾架构设计容易使V2X沟通和服务。每辆车是一个移动节点的迷雾,与基础设施,其他车辆,云计算和外部实体,如行人和自行车。
雾节点功能
让我们看看雾节点实现的四种类型的广告生态系统:
- 车载雾节点提供分布式机载计算基础设施广告车辆。节点处理数据从相机、激光雷达等传感器。他们交流在高速databus上先进的分析、路径规划和广告所需的快速反应。实时可视化的危害可以导航系统。
此外,车载雾节点与其他车载和基础设施提供通信雾节点提前进入旅游安全信息,如道路或车道闭包,障碍物在路上,交通事故等事故,危险物品在路上,冰冷的条件等等。这使得广告车辆动态计划替代路线。 - 沿着道路和车载节点的雾,在网络边缘,提供延长传感功能,如智能相机与计算机视觉在车辆,智能摄像机与计算机视觉在道路和路边单元传感器功能检测指标如车辆密度和坡道长度。
- 雾与路边单元节点共存,如交通信号灯、路灯或充电站亭,提供本地和区域服务条款(例如,交通信息更新,事故警报、旅游指南信息,购物促销活动)。
- 雾街节点位于与相机提供优势分析能力接近源可汽车摄像头或街头摄像头。
雾提供了一个全新的网络资源广告的应用程序可以运行他们的计算、网络和存储功能,位于之间的汽车和传统资源的云。OpenFog架构可以极大地改善性能、效率、带宽、可靠性和功能丰富的广告网络。
所有的物联网网络议程贡献者负责的内容和精度。观点的作家和不一定传达的思想物联网议程。